차세대 로봇 개발 가속화를 위한 통합 플랫폼 출시
엔비디아(NVIDIA)가 로봇학습 컨퍼런스(Conference for Robot Learning, CoRL)에서 로봇 개발자를 위한 새로운 기술들을 대거 발표했다. 아이작 랩(Isaac Lab) 로봇 학습 프레임워크의 일반 공개와 휴머노이드 로봇을 위한 프로젝트 GR00T의 새로운 워크플로우, 그리고 기존 대비 12배 빠른 오픈소스 토크나이저가 주요 내용이다.
엔비디아의 스펜서 황은 “개발자들이 인공지능(AI) 기반 로봇, 특히 휴머노이드 로봇 개발을 크게 가속화할 수 있게 됐다”고 밝혔다. 이번에 공개된 기술에는 아이작 랩 로봇 학습 프레임워크 정식 버전과 휴머노이드 로봇 개발 가속화를 위한 프로젝트 GR00T의 6가지 새로운 워크플로우, 그리고 비디오 데이터 처리를 위한 코스모스 토크나이저(Cosmos tokenizer)와 네모 큐레이터(NeMo Curator)가 포함됐다.
혁신적인 성능의 오픈소스 도구 제공
코스모스 토크나이저는 머신러닝 모델 학습을 위해 이미지와 비디오를 토큰화하는 오픈소스 도구다. 엔비디아는 이 도구가 경쟁 제품보다 최대 12배 빠른 처리 속도와 뛰어난 압축률을 제공한다고 밝혔다. 비디오 처리 큐레이션을 담당하는 네모 큐레이터는 기존 파이프라인보다 약 7배 빠른 처리 속도를 보여준다.
아이작 랩 1.2 정식 출시로 로봇 학습 혁신
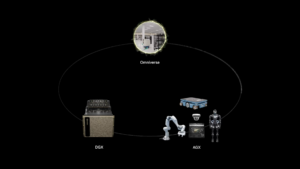
아이작 랩 1.2는 엔비디아의 옴니버스(Omniverse) 플랫폼을 기반으로 한 오픈소스 로봇 학습 프레임워크다. 이 플랫폼은 휴머노이드와 4족 보행 로봇, 협동 로봇 등 모든 유형의 로봇을 지원하며, 복잡한 동작과 상호작용을 위한 학습 기능을 제공한다. 이미 어질리티 로보틱스(Agility Robotics), 보스턴 다이나믹스(Boston Dynamics), 버클리 휴머노이드(Berkeley Humanoid), 유니트리 로보틱스(Unitree Robotics) 등 유수의 기업들이 이 플랫폼을 도입했다.
프로젝트 GR00T, 휴머노이드 로봇 개발 워크플로우 확장
프로젝트 GR00T는 로보틱스를 위한 가속화된 라이브러리, 기반 모델, 데이터 파이프라인을 제공하는 엔비디아의 이니셔티브다. 이번에 새롭게 추가된 6가지 워크플로우는 다음과 같다:
- GR00T-GEN: 생성형 AI 기반 3D 환경 구축
- GR00T-Mimic: 동작 및 궤적 생성
- GR00T-Dexterity: 조작 기능
- GR00T-Control: 전신 제어
- GR00T-Mobility: 이동 및 내비게이션
- GR00T-Perception: 다중 모달 센싱
엔비디아의 엠바디드 AI 수석 연구 관리자인 짐 판은 “휴머노이드 로봇은 엠바디드 AI의 다음 물결”이라며 “엔비디아 연구진과 엔지니어링 팀은 전 세계 휴머노이드 로봇 개발자들의 발전을 돕기 위해 프로젝트 GR00T를 구축하고 있다”고 설명했다.
허깅페이스와의 전략적 협력 강화
엔비디아는 허깅페이스(Hugging Face)와의 협력도 발표했다. 허깅페이스의 르로봇(LeRobot) AI 플랫폼이 엔비디아의 AI, 옴니버스, 아이작 기술과 결합되어 젯슨 오린 나노(Jetson Orin Nano) 플랫폼에서 시연됐다. 르로봇의 수석 연구 과학자인 레미 카데느(Remi Cadene)는 “허깅페이스의 오픈소스 커뮤니티와 엔비디아의 하드웨어, 아이작 랩 시뮬레이션의 결합은 로보틱스 분야의 AI 혁신을 가속화할 잠재력이 있다”고 평가했다.
아이작 랩은 현재 엔비디아 개발자 사이트에서 BSD 3-clause 라이선스로 이용할 수 있으며, 프로젝트 GR00T 워크플로우는 곧 공개될 예정이다. 코스모스 토크나이저는 깃허브(GitHub)와 허깅페이스에서 아파치 2.0(Apache 2.0) 라이선스로 제공되며, 네모 큐레이터는 이달 말까지 출시될 예정이다. 휴머노이드 로봇 개발자들은 엔비디아의 개발자 프로그램에 지원하여 참여할 수 있다.
엔비디아의 새 기술은 엔비디아 기술 블로그에서 확인할 수 있다.
관련 콘텐츠 더보기