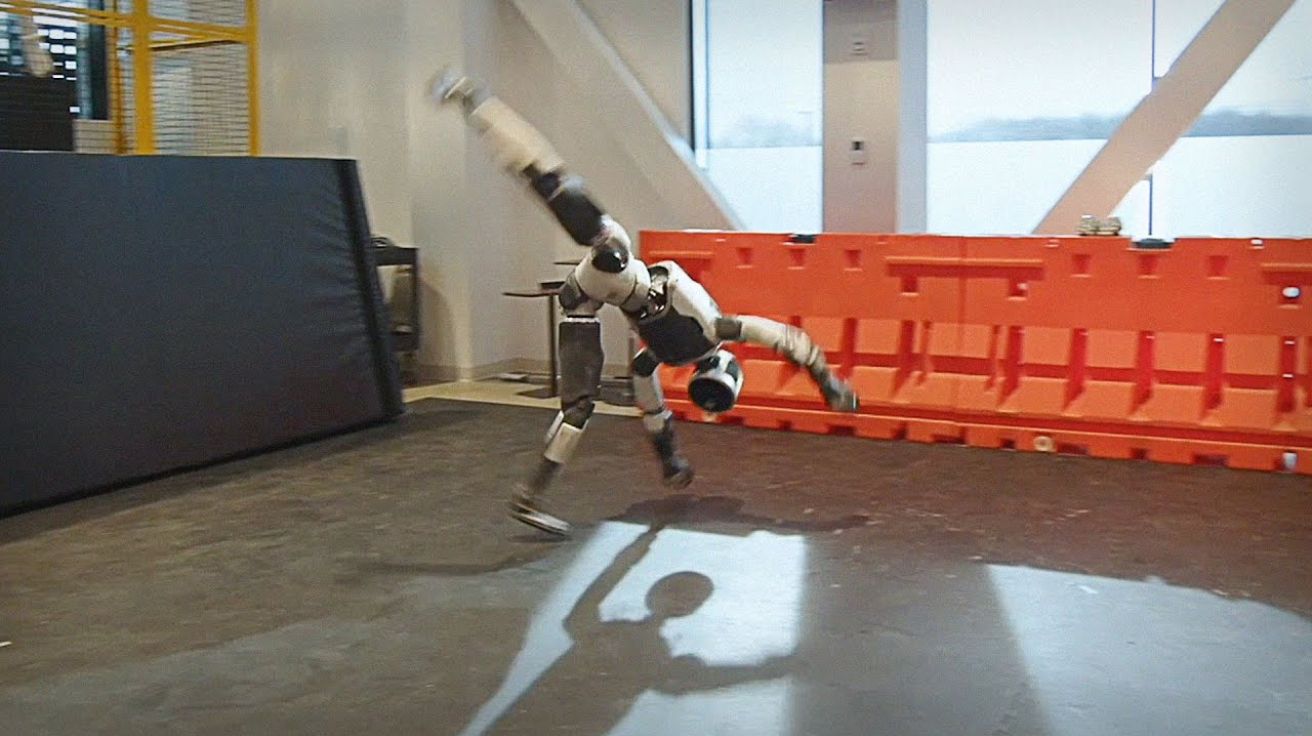
휴머노이드 로봇 전문기업 피규어(Figure)가 강화학습(Reinforcement Learning, RL)을 활용해 인간과 같은 자연스러운 보행이 가능한 로봇 개발에 성공했다. 25일(현지 시간) 자사 홈페이지에 따르면, 피규어는 시뮬레이션에서 학습한 내용을 실제 로봇에 즉시 적용하는 혁신적 기술을 선보였다. 피규어는 고정밀 물리 시뮬레이터를 통해 몇 시간 만에 수년치의 데이터를 시뮬레이션했다. GPU 가속 물리 시뮬레이션에서 각기 다른 물리적 매개변수를 가진 수천 대의 가상 로봇을 병렬로 훈련시켰으며, 다양한 지형과 상황에 대응할 수 있는 단일 신경망 정책을 개발했다.
피규어가 개발한 기술의 핵심은 시뮬레이션-현실 간극(sim-to-real gap)을 성공적으로 극복한 점이다. 도메인 랜덤화와 kHz급 토크 피드백 제어를 결합하여 시뮬레이션에서 훈련된 정책이 추가 조정 없이도 실제 하드웨어에 제로샷(zero-shot) 전송되도록 했다. 이 기술은 로봇 간 변화, 표면 마찰 변화, 외부 충격에도 강건하게 작동하며, 모든 피규어 02 로봇 플릿에서 일관된 인간형 보행을 구현한다.
단순한 이동이 아닌 인간 보행의 특징적 요소인 발뒤꿈치 착지, 발가락 들기, 다리 움직임과 동기화된 팔 흔들기 등을 구현했다. 인간 보행 참조 궤적을 모방하도록 보상 체계를 설계해 자연스러운 걸음걸이를 학습하도록 했다. 피규어는 10대의 로봇이 모두 동일한 RL 신경망으로 조정 없이 작동하는 것을 입증했으며, 이 기술이 가까운 미래에 수천 대의 로봇으로 확장될 수 있음을 보여줬다.
피규어는 이번 성과가 기술의 잠재력 일부에 불과하다며, 로봇이 실제 세계에서 직면할 수 있는 모든 인간형 시나리오를 처리하도록 정책을 확장해 나갈 계획이라고 밝혔다.
해당 기사의 원문은 링크에서 확인할 수 있다.
이미지 출처: 피규어
기사는 클로드와 챗GPT를 활용해 작성되었습니다.
관련 콘텐츠 더보기


![[Q&AI] 오늘 밤 한일전... AI가 예측한 승률은?](https://aimatters.co.kr/wp-content/uploads/2025/07/AI-Matters-기사-썸네일-QAI-7.jpg)